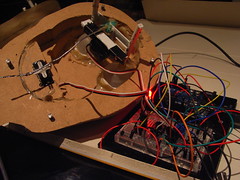
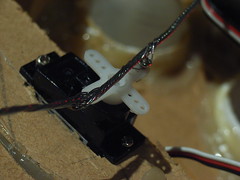
Left/right is controlled by mounting the eyeballs on a sort of parallelogram hinging, with the servo attached to the connectors to convert the rotary action to a shear.

Up down is controlled by a bike brake cable attached to the other servo. This is loose connected to the eyeball rig and converts the rotary action to a push/pull
No comments:
Post a Comment